Двуногий шагающий робот с электрогидравлическим приводом
С каждым годом в мире возникает все больше ситуаций, требующих от
людей выполнения самых разнообразных работ в тяжелых, опасных, а подчас и
несовместимых с жизнью условиях. В ответ появляются все новые средства
экстремальной робототехники. Правда, в своем большинстве они очень похожи друг
на друга. Как правило, для выполнения задач на суше это самоходное колесное или
гусеничное шасси с установленными на нем манипулятором, средствами наблюдения
или другим оборудованием. Управление осуществляется дистанционно по радио или
кабелю, а питание от аккумуляторов или также по кабелю. Эти роботы создаются уже
не один десяток лет. Сложившимися за это время коллективами накоплен большой
опыт по их разработке и применению, в ряде случаев весьма эффективному. Однако
нельзя отрицать, что такая техника имеет (как и любая другая) ограниченные
возможности и, соответственно, сферы применения. И как прежде, люди, рискуя
здоровьем и жизнью, работают в завалах, на пожарах, в условиях химического,
биологического и радиоактивного заражения, борются с преступниками и
террористами. Причем, чаще всего все это происходит не в чистом поле, а в
зданиях и различных сооружениях, кабинах и помещениях различной техники, т.е. в
условиях, изначально созданных для человека, с учетом его двурукости,
двуногости, типичных размеров, массы и, если можно так сказать, кинематики тела.
По этой причине развиваются и другие направления экстремальной
робототехники. Создаются средства с самой разнообразной кинематикой и размерами
исполнительных механизмов. Существенно различаются они и по динамическим, и по
энергетическим характеристикам. В качестве одного из таких средств может
использоваться робототехнический комплекс, включающий в себя антропоморфный
двуногий шагающий робот (ДШР) и мобильный пост управления. ДШР по кинематике,
размерам и массе аналогичен человеку, снабжен автономным источником энергии,
средством связи с постом управления, а также мощной системой управления,
позволяющей выполнить некоторые действия в супервизорном или автоматическом
режиме (например самостоятельный выход с места работ при отсутствии связи).
Такой робот может иметь значительные преимущества в среде, приспособленной для
человека.
При нынешнем уровне развития техники выполнение сложных
нестандартных действий в непредсказуемой обстановке возможно только под
управлением человека. Одним из наиболее удобных способов управления
антропоморфным роботом является копирующее управление, которое в сочетании со
средствами виртуальной реальности может создать у оператора ощущение присутствия
на месте работ и, таким образом, многократно повысить качество и
производительность работ по сравнению с традиционными средствами экстремальной
робототехники.
Для управления ДШМР может использоваться мобильный пост, оснащенный
средствами связи и задающим органом, которые вместе с приводами робота образуют
обратимую многостепенную систему приводов.
Такой робототехнический
комплекс может использоваться как средство разведки, спасательное, аварийно
восстановительное, а также боевое средство как на суше, так и под водой.
Дополнительные преимущества дает возможность работы нескольких
операторов, специалистов в разных областях, работающих на один робот, несколько
дежурных роботов на один пост управления и оперативное переключение поста
управления с одного робота на другой (например, работающий в наиболее важном
месте или с вышедшего из строя на исправный). Распределенные по обслуживаемому
объекту роботы и посты управления позволяют создать инспекционно-охранную
систему немедленного реагирования. Небольшая группа квалифицированных
специалистов-операторов, специализирующихся на различных видах работ, может
оперативно переключаться на управление заранее размещенными в потенциально
опасных местах объекта роботами.
Для создания таких робототехнических
комплексов придется решить множество технических, технологических и научных
проблем. Так для осуществления сложных координированных движений ДШРМ должен
иметь большое количество управляемых степеней подвижности (человек имеет около
330). Управлять многозвенной системой, содержащей пусть значительно меньшее, но
все равно очень большое по современным мерка количество приводов, традиционными
методами теории управления невозможно. Нужны новые методы анализа и синтеза
систем управления, учитывающие специфику ДШР. Бортовой источник энергии ДШР
располагает огра¬ниченной мощностью, что ужесточает требования к качеству
приводов, вносит дополнительную специфику в алгоритмы управления. Для
перемещения в изменяющейся внешней среде и выполнения рабочих операций ДШРМ
должен быть оснащен системой технического зрения. Большой интерес представляет
создание навигационно-информационной системы — гибрида инерциальной
навигационной системы и системы технического зрения. И наконец, одой из
важнейших и сложнейших научных задач, которые необходимо решить при создании
такого робота – это собственно задача управления ходьбой.
Современные управляемые при помощи компьютера шагающие роботы и
другие машины с различным количеством ног создают практически во всех
промышленно развитых странах мира. Настоящее восхищение вызывают, например,
японский робот-андроид Asimo или американский четырехногий военный робот BigDog.
Усилиями нашего коллектива, состоящего из сотрудников двух подразделений
–кафедры Гидромеханики, гидромашин и гидропневмоавтоматики (Э10) и
Межотраслевого института повышения квалификации (МИПК) с 1989 г. ведутся работы
по созданию шагающих роботов и антропоморфных механизмов.
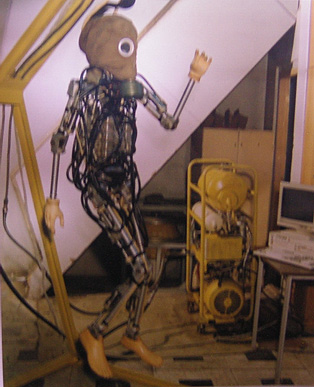
В 1990 г.
создан первый лабораторный образец двуногого шагающего робота (рис. 1) с
электрогидравлическим следящим приводом и реализована статическая ходьба по
ровной поверхности. Двигался он медленно и постоянно удерживал центр масс над
площадью опоры. Его десятистепенной исполнительный механизм имел высоту около 1
м и массу около 90 кг. Электрогидравлические приводы на основе авиационных
электрогидравлических усилителей питались рабочей жидкостью от внешней насосной
станции по шлангам. Датчики углов, расположенные в шарнирах, кабелями
соединялись с системой управления, которая также находилась вне исполнительного
механизма. Тем не менее, тогда удалось разработать адекватные математические
модели динамики исполнительного механизма с электрогидравлическими приводами.
Был разработан алгоритм управления, использующий итерационный метод решения
обратной задачи кинематики робота.
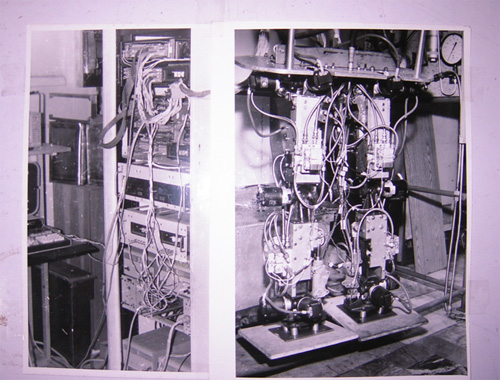
Рис. 1. Система управления и исполнительный механизм первого
лабораторного двуногого шагающего робота, созданного на нашей кафедре.
В 1991 г. изготовлен макетный образец роботизированного манекена для
испытания защитной одежды (рис. 2). В ходе работы над его конструкцией
отработаны некоторые конструктивные решения, которые могут быть использованы при
создании исполнительных механизмов роботов с электрогидравлическими
приводами.
Рис. 2. Роботизированный манекен для испытания защитной одежды.
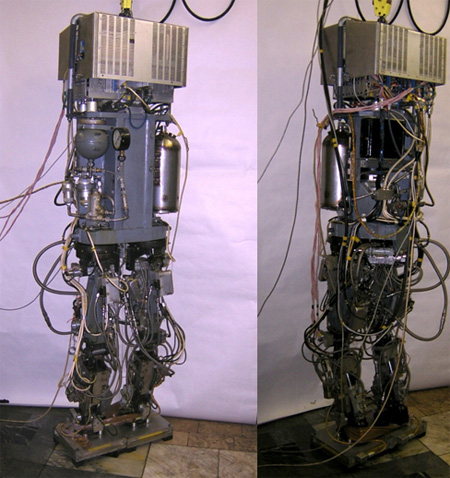
В начале 90-х наш коллектив сильно поредел, интенсивность работы над
роботом многократно снизилась, однако с 1996 г. началась модернизация робота,
плавно переросшая в создание практически нового лабораторного образца робота
(рис. 3). Теперь насосная станция гидропитания и система управления находятся
непосредственно в корпусе робота. Увеличено до 12 число управляемых степеней
подвижности. Имеется бесплатформенная система ориентации, силомоментное
очувствление стоп. Высота робота 2.2 м, масса 200 кг. Давление рабочей жидкости
20 МПа. Бортовая система управления собрана на основе обычного персонального
компьютера, к которому добавлены специфические для данного робота устройства
сопряжения, питания и т.п.
Рис 3. Второй шагающий робот, созданный на нашей кафедре
Для управления движением робота разработано оригинальное программное
обеспечение (ПО), реализующее множество сложных алгоритмов различными системами
робота, а также алгоритмы управления ходьбой и стабилизации движения. Это ПО
создано с использованием операционной системы реального времени. В основу
положен модульный принцип. ПО состоит из относительно независимых компонент,
связанных между собой программой-транспортом, которая обеспечивает обмен данными
и командами в жестком реальном времени. Работают эти программы одновременно на
нескольких компьютерах, объединенных в сеть.
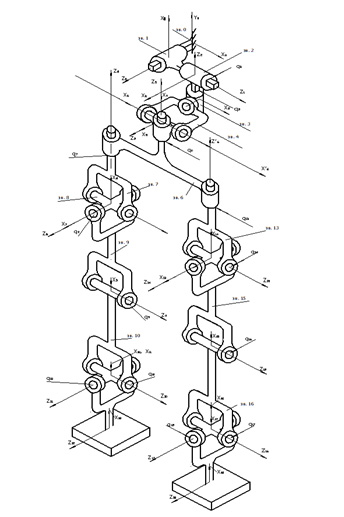
Рис 4. Кинематическая схема ДШР.
Разработанные на нашей кафедре математические методы и алгоритмы
позволяют роботу ходить почти также, как человеку, не удерживая постоянно центр
тяжести над площадью опоры. По сути, такая ходьба представляет собой непрерывное
управляемое падение. Этот режим движения называется динамической ходьбой.
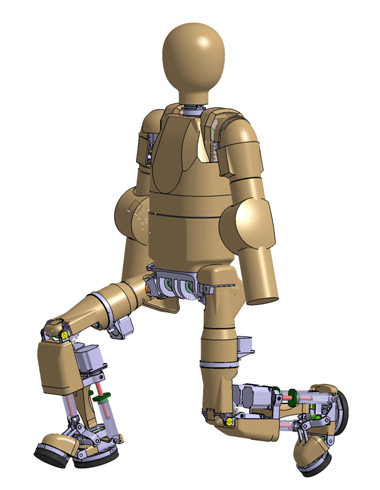
Сейчас с учетом накопленного опыта студенты и аспиранты кафедры под
руководством преподавателей разрабатывают следующую модель шагающего робота. Он
должен быть значительно меньше, легче и, как говорится, презентабельнее (рис.
5).
Рис. 5. ДШР, проектируемый студентами в настоящее время.